1. 介绍
深度学习中,虽然CNN除了被经常用来进行图像相关的任务外,也可以作为一种特征提取的方法用在NLP任务中。但是在NLP任务中,更多的我们还是使用RNN模型,本文就简单介绍几种常用的RNN结构。
2. 基本RNN
不同于在CNN模型中,网络的状态只决定于输入。在RNN中,最明显的一个特征就是它还决定于上一个时刻的状态,因此RNN经常被用来处理序列问题,被用在序列性质非常明显的NLP任务上。
基本的RNN结构如下:
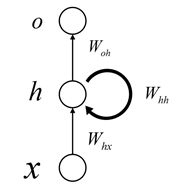
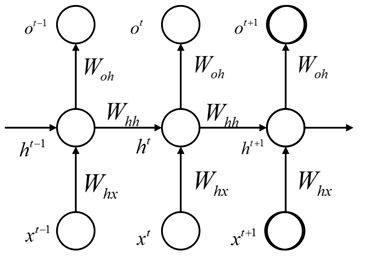
它跟CNN和DNN区别最大的地方就在于这些前馈神经网络是个有向无环图的模型(DAG),而在RNN中是至少包含一个环的,在时间上进行展开我们可以更明显的看到这种特性:
公式可以表示为:
其中\(x^t\)是t时刻的输入,在NLP任务中,通常代表一句话中第t位置处的字。隐藏层的状态h不光决定于当前的输入,还决定于前一个时间t-1的状态,通过矩阵\(W_{hh}\)联系t-1的状态和当前状态,通过\(W_{hx}\)联系当前输入\(x^t\)和当前状态,这里的激活函数通常可以使用tanh函数。对于t时刻的输出通常可以使用一个softmax回归,参数矩阵为\(W_{oh}\)。
3. RNN的反向传播 -- BPTT
可以看到,类似于CNN在不同位置上共享卷积矩阵的参数,RNN在不同时刻t是共享参数的。对于不同时刻t,使用的是同样的\(W_{hh}, W_{oh}\)。对于RNN的反向传播有自己的一套算法BPTT,BP是反向传播,TT是Through Time。在介绍BPTT之前,先回忆一下在DNN中的反向传播。DNN的结构如下:

可以看到,前向过程的公式为:
方向传播的话先定义一个中间变量:
代表损失函数C关于第l层的未激活输出\(z^l\)的偏导数,然后对于任意一层的参数\(W^l\)的偏导数为:
其中\(\frac{\partial{z^l}}{\partial{w^l}}\)为\(a^{l-1}\),这个在一次前向过程中已经全部求得,反向传播要做的事就是通过一次反向过程求得所有的\(\frac{\partial{C}}{\partial{z^l}}\),也就是所有层的\(\delta{l}\)。
通过求导的链式法则:
于是可以得到类似于前向过程的反向过程公式:
可以看到,前向过程是从第1层一直到第L层进行计算,而这里是从第L层到第1层计算每层的\(\delta^l\),所以这种算法被称为反向传播算法。
讲完了DNN的情况,这里再来理解RNN的情况。RNN的特殊在于时间t引入。将RNN沿时间进行展开:
可以发现,RNN展开后的结构和DNN的结构原理上是一样的。只是在DNN中,链接发生在相邻的隐藏层上面。而在RNN中,链接发生在相邻时间上。
然后DNN每一层的参数是不一样的,而在RNN中一个序列样本下,不同时间上的参数是一致的。在这种情况下,如果我们最后考虑的损失函数只和最末尾的t时刻的输出\(o^t\)相关的话(情感分析,文本分类等都属于这种情况),在进行参数\(\beta\)的更新时需要考虑每个时刻t上的损失函数对\(\beta\)的梯度之和,即:
这里的\(\beta^k\)是参数在时间k上的状态,可以看作是DNN中的第k层的参数,于是利用反向传播可以求出每个时刻k的偏导数。但是实际上不同时刻k的参数\(\beta\)是一个统一的参数,因此需要进行累加作为对参数\(\beta\)总的偏导数。
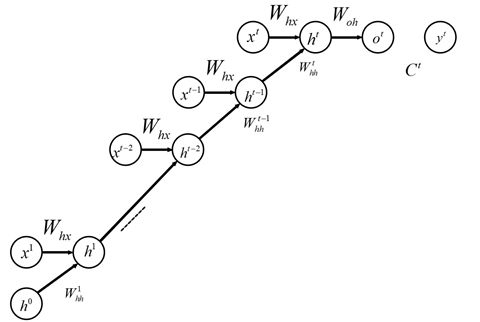
如果我们考虑的损失函数和每个时刻的输出都有关(序列标注等属于这种情况),即\(C = f(C^1, C^2, ..., C^{t-1}, C^t)\),则有:
对于其中的每一时刻\(\frac{\partial C^k}{\partial \beta}\),都需要考虑k时刻以前所有的对\(\beta\)的偏导数的和:
于是得到,关于\(\beta\)的总的导数为:
4. RNN的梯度爆炸/消失
可以看到RNN的BPTT算法与DNN的BP算法非常相似,只是前者发生在时间上,后者发生在隐藏层上。那么对于时间跨度很长的情况,BPTT就很可能会发生梯度爆炸或者梯度消失的情况。
激活函数:
像DNN一样,如果激活函数是\(\sigma\)函数或者tanh函数,进行反向传播的时候很容易就会导致梯度很小,产生梯度消失的问题。
参数\(W_{hh}\):
不同于DNN中每层的参数是不一样的,RNN中的参数\(W_{hh}\)每个时刻是一个参数,所以在进行反向传播的时候会进行\(W_{hh}\)的累乘。
当\(W_{hh}\)为对角阵时,我们就有结论:
- 当对角线元素小于1,则其幂次会趋近于0,进而导致梯度消失
- 当对角线元素大雨1,则其幂次会趋近于无穷大,进而导致梯度爆炸
当\(W_{hh}\)不是对角阵时,对矩阵进行随机初始化。观察累乘后的分布如下:
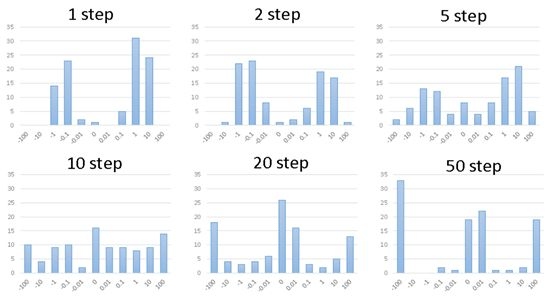
可以看到,经过一定次数的相乘以后,大部分的数值都是趋近于绝对值大的数,要么趋近于0。这就分别对应了梯度爆炸和梯度消失的情况。
理论上,\(W_{hh}\)是个方阵,简化问题,假设它是可以进行对角化的,那么可以分解为\(Q\sum Q^{-1}\),其中的\(\sum\)也是对角矩阵,累乘的话同样会发生上面讨论的对角阵相乘的情况。
处理梯度消失/爆炸的方法
梯度消失:
传统的使用RELU等激活函数的方法有效,但是存在更好的RNN架构直接就可以解决这样的问题,比如下文中要介绍的LSTM,GRU等。
梯度爆炸:
通常还是使用Gradient Clipping,在梯度大于一个阈值的时候,进行动态的放缩,将它限制在一定范围内。
5. BRNN
BRNN就是Bi-directional RNN,双向的RNN。前面的讨论都是单向的,从前到后,双向就是多了一层,从后到前:
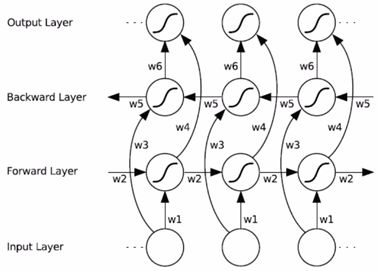
对于每一个时刻t,它隐藏层的状态不光决定于前向层经过该时刻带来的状态h1,还决定于后向层经过该时刻带来的状态h2,然后进行链接[h1, h2]得到的就是在时刻t上的状态。两层可以分别保留各自的参数\(W_{hh}\),虽然使用不同的维度在理论上是可以的,但是实际上通常前向层和反向层保持维度一致。
这种模型带来的好处是显而易见的,它不光能够考虑当前时间受前面时间的影响,还能考虑受后面时间的影响,看几个简单的例子来感受一下:
- 在命名实体识别中,“我们爱吃红烧肉”,根据前向层很容易根据
爱吃推断红烧肉是一道菜名,但是在“红烧肉很好吃”中,如果只根据前向,就比较难判断了,这个时候如果加上后向层,就可以根据很好吃判断它前面的字段红烧肉是菜名了。 - 在情感分析中,“这个公园好美啊,尽管有一点拥挤”,如果只看前向可能会比较倾向于把这个句子判断为负情感,但是如果加上反向的特征的话,就更容易判断争取,识别为正情感。
当然上面的例子只是简要说明一下双向的好处,实际的算法肯定不是这么浅显直观的计算的。
既然BRNN只是在RNN的基础上反向加了一层,本质是一样的,只是训练的时候考虑两层的参数,这里就不再重复介绍了。
6. LSTM
前面的讨论表明理论上RNN在考虑前后文联系的时候可以发挥不错的作用,尤其是当相关信息的位置间隔比较短的时候:
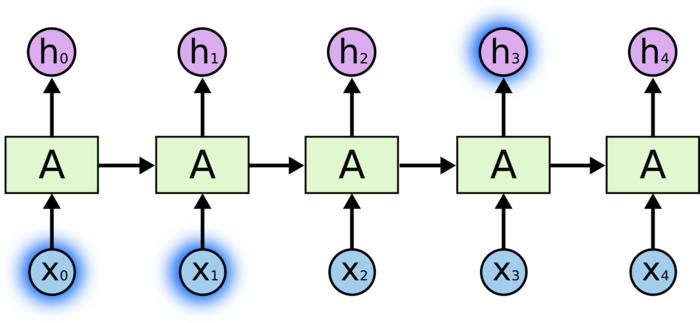
但是根据前一小节的讨论,当相关信息的位置间隔越来越长的时候,由于存在梯度消失的问题,在基础RNN上进行这样的参数学习非常困难的。
LSTM,long short term网络的出现就解决了这样的问题,它可以非常轻松的学习到序列中的长期依赖信息。
LSTM通常指的是里面的RNN网络中的LSTM Cell,类似于下图:
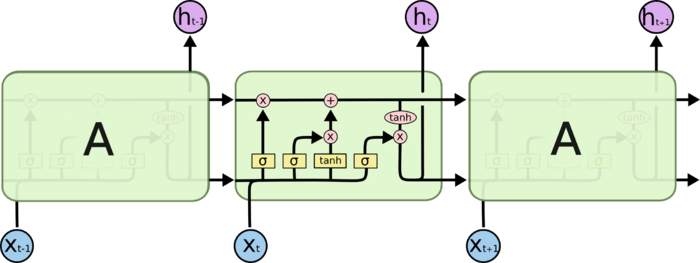
普通的RNN Cell,并没有中间那么复杂的链接,基本就是一个隐藏层+激活函数(通常使用tanh),而在在上图的LSTM Cell中有四个进行交互的层,后面可以看到这些是LSTM中的各种功能的门函数。
6.1 LSTM核心思想
LSTM中很重要的信息载体就是其每时刻的细胞状态,它会沿着水平线上传播。它在整个链上传播的过程中,会进行一些简单的线性操作。
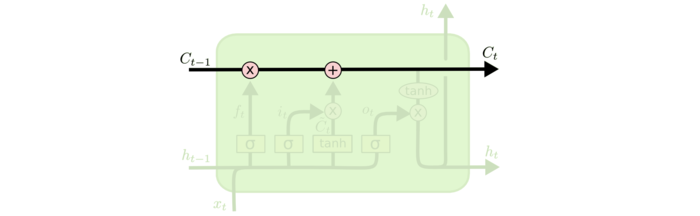
这些线性操作会使得信息可以增加或者减少,而决定信息是如何增加或者减少的话就要依靠LSTM中定义的各种门函数。每个门可以理解为一个开关,0表示不通过,1表示通过,0到1之间的数表示部分通过,因此门函数使用sigmoid神经网络层代替,在sigmoid输出一个值后进行pointwise的操作:
6.2 LSTM中的三个门
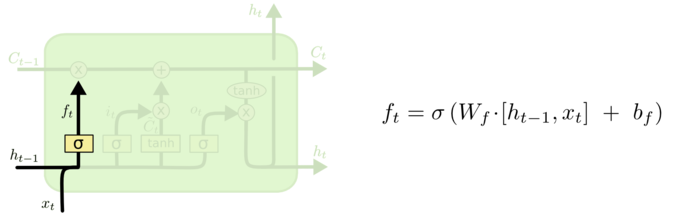
遗忘门
在LSTM的第一步中要决定过去的信息需要遗忘多少,保留多少,遗忘们就起到这样的作用。它通过一个参数矩阵\(W_f\)(f代表forget),作用于上一个隐藏层的状态\(h_{t-1}\)和当前输入\(x_t\),然后通过sigmoid函数得到一个[0, 1]的数:
回到具体的语言模型情况,考虑当前的细胞状态\(C_{t-1}\)包含当前主语的性别,我们想要预测合适的代词。如果当前的输入\(x_t\)包含新的主语,这个时候就要通过遗忘门来忘掉旧的主语。
输入门
知道了要忘掉哪些信息后,就要决定记住哪些新的输入信息了。
首先新的信息依靠一个参数矩阵\(W_C\)和tanh激活函数,然后哪些信息需要记忆依靠的是类似遗忘门的sigmoid神经层计算的一个输入门函数。
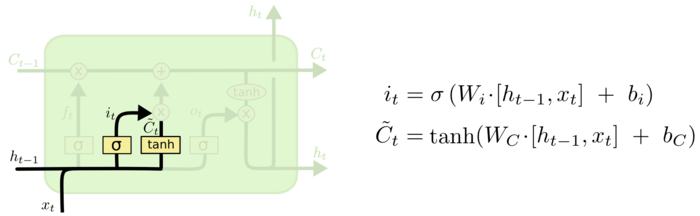
其中\(i_t\)是输入门层,决定要更新什么值,就是要记住哪些新的信息,然后\(\tilde{C}_t\)是候选的新的状态。
然后依靠遗忘门和输入门的线性组合就可以得到新的细胞状态了:
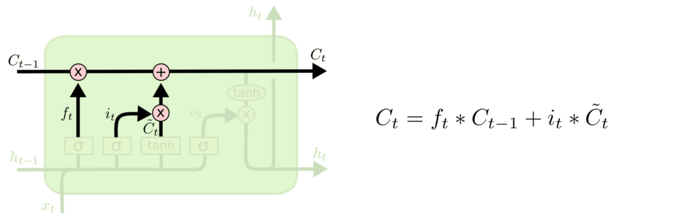
可以看到新的细胞状态有两个部分,一个是有旧的细胞状态带来的,一个是有新的输入信息带来的。
语言模型的例子里,我们希望模型新的细胞状态能记住新的主语的性别。
输出门
在得到了新的细胞状态\(C_t\)后,就能够直接通过激活函数(tanh)得到我们的输出了。不过这里我们仍然要一个门控制输出哪些信息,同样使用sigmoid神经层:
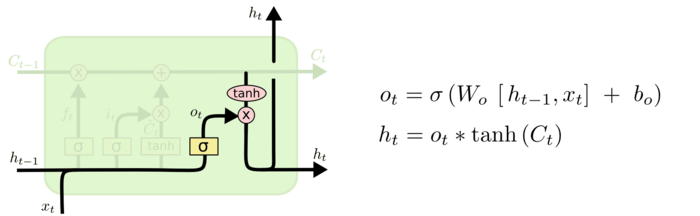
在语言模型的例子里,有可能是看到一个代词就选择输出一个跟动词有关的信息。
LSTM结构的个人理解
通过上面LSTM结构的解析,我们可以看到网络的输出和计算三个门的值所使用的都是\(h_t\)。于是可以这样理解,在LSTM网络沿着时间传播的过程中,细胞状态\(C_t\)时刻保存着最重要的信息。然后上一时刻的网络输出\(h_{t-1}\)和当前的网络输入\(x_t\)通过对应的矩阵计算得到三个门的值。输入门和遗忘门负责合并过去细胞状态和当前新信息,输出门负责控制对更新后的细胞状态的选择性输出。当前时刻的输出又被用来进行下一时刻三个门的计算。
6.3 LSTM的变体
上面的LSTM是标准的LSTM结构,下面讨论几个变体。
peephole connection
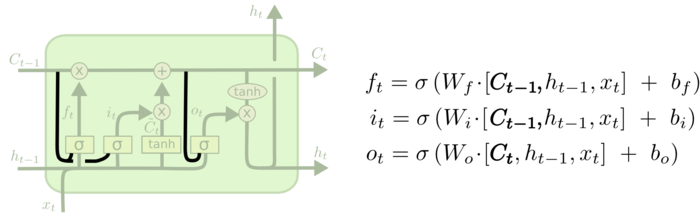
从上面的结构可以看出peephole connection就是让门的计算也同样受细胞状态的影响:遗忘门和输入门受上一时刻细胞状态\(C_{t-1}\)的影响,计算输出门时当前的时刻的细胞状态\(C_t\)已经计算好了,于是收到\(C_t\)的影响。从公式中也可以很容易看出三个门计算中对于细胞状态的引入。
当然三个peephole connection可以有选择的添加,并非一定要三个一起加入。
coupled forget gate and input gate
不同一开始遗忘门和输入门分别计算,coupled就是只计算遗忘门\(f_t\),然后输入门就是\(1-f_t\)。
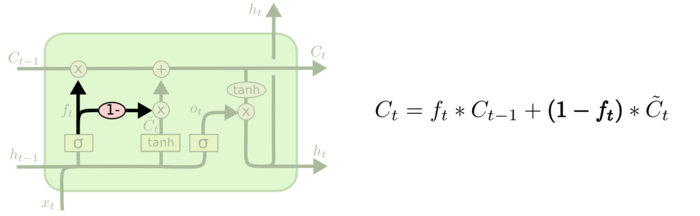
在这种情况下,当遗忘门确定的时候,输入门也同时被确定。当我们要保留旧细胞状态的时候(\(f_t = 1\)),新信息就完全不会被加入。当我们要遗忘旧细胞状态的时候(\(f_t = 0\)),新的细胞状态完全由新信息决定。
6.4 LSTM与梯度消失
在描述LSTM的一开始,就说了它可以处理在长期记忆上产生的梯度消失问题,它具体是怎们做的呢?
先看一下LSTM反向传播时\(\delta^k = \frac{\partial C^t}{\partial c^k}\)是怎么传播的:
根据LSTM的公式\(c^t = f^t \cdot c^{t-1} + i^t \cdot g^t\) 可以的到上式可以转变为:
上面的省略号是一些无关部分,不影响我们的分析。可以看到,当\(f^t = 1\)时,省略号那部分无论多小,梯度都是可以很容易反向传播的。此时,即使是学习长期记忆也不会发生梯度消失问题。当\(f^t=0\)时,上一时刻的信号不影响到当前时刻,\(f^t\)在这里控制着梯度传递到前一时刻的衰减程度,和它在遗忘门上的功能是一致的。
7. GRU
GRU和LSTM有着一定的相似性,算是一个简化版本的LSTM。它将遗忘门和输入门合并为更新门,因此只有两个门。而且它没有细胞状态\(C_t\)的流动,只保留隐藏状态\(H_t\)。
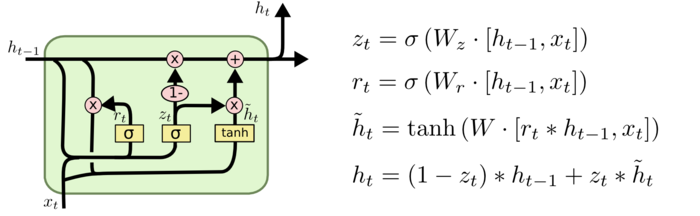
上图中的\(r_t\)是reset gate 重置门,它负责对过去的隐藏状态\(h_{t-1}\)进行取舍,以用来计算新的候选隐藏状态\(\tilde{h_t}\)。不同于LSTM中,门函数是作用于tanh激活的计算结果,这里的重置门直接作用于计算过程中的\(h_{t-1},\)可以看到如果\(r_t=0\),在计算\(\tilde{h_t}\)时,完全受当前输入\(x_t\)的影响。
\(z_t\)是更新门,它负责选择\(h_{t-1}\)在新的输出\(h_t\)中所要记住的信息,注意到这里旧的信息和新的信息的合并是coupled。
8. 结构的选择
上面讲了LSTM,GRU及其很多变体,Greff, et al.(2015)给出了一些流行变体的比较,结论是它们基本一致。其它的一些论文比较,也通常只是发现在具体任务上,某些结构可能会优于某些结构,但是总的来说,并没有哪个结构一定是最好的。
至于LSTM和GRU的选择,通常效果也差不多,不过GRU有更少的参数,相对来说容易训练,过拟合的情况也会好很多,更适用于训练数据较少的情形。
9. 结论
目前看来RNN架构的发展是要弱于CNN的,不过LSTM和GRU解决了RNN中长期依赖的问题,在RNN中取得了巨大的成功。由于RNN常用的结构少于CNN,这里就用一篇文章总结了一下常见RNN的结构。不过论模型的难度的话,无论是理论还是应用,RNN都是要难于CNN的。
LSTM的出现算得上是RNN中一个突破性的进展,接下来可能attention机制是一个很重要的研究热点。自己今后也要多多关注和学习这一方面的内容。
参考资料
[1] Understanding Deep Learning in One Day - 李宏毅
[2] 当我们在谈论数据挖掘 - 余文毅
[3] Understanding LSTM Networks - Christopher Olah
[4] LSTM: A Search Space Odyssey - Klaus Greff, et al
[5] Framewise Phoneme Classification with Bidirectional LSTM and Other Neural Network Architectures - Alex Graves, et al